

Tecnologia
Cientistas criam “controle” de game de corrida “instalado” no cérebro
Pesquisadores desenvolvem interface que permite jogar um game de corrida apenas com o pensamento. A ideia é aperfeiçoar o dispositivo para devolver autonomia e liberdade para as pessoas com deficiências motoras
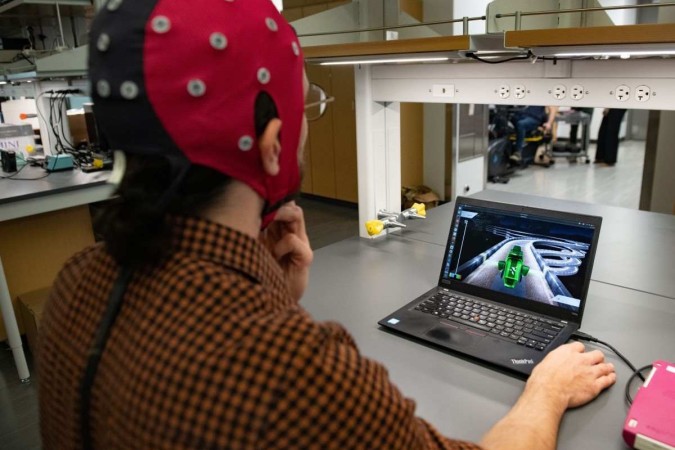
Imagine jogar um game de corrida, como Mario Kart, usando apenas o cérebro para executar a complexa série de curvas em uma volta. Isso não é ficção científica, mas um programa real que engenheiros da Universidade do Texas, em Austin, criaram como parte da pesquisa sobre interfaces cérebro-computador.
A ideia é ajudar a melhorar a vida de pessoas com deficiência motora. Mais importante ainda, os pesquisadores incorporaram recursos de aprendizado de máquina na interface, tornando-a uma solução única para todos, garantem.
Normalmente, esses dispositivos exigem calibração extensiva para o usuário — cada cérebro é diferente, tanto para pessoas saudáveis quanto para aquelas com deficiência — e isso tem sido um grande obstáculo para a adoção convencional da tecnologia. A nova solução pode compreender rapidamente as necessidades individuais e se autocalibrar, por meio da repetição. Isso significa que vários pacientes podem usar o dispositivo sem precisar ajustá-lo individualmente.
“Quando pensamos em um ambiente clínico, essa tecnologia fará com que não precisemos de uma equipe especializada para fazer o processo de calibração, que é longo e tedioso”, disse Satyam Kumar, estudante de pós-graduação no laboratório de José del R. Millán, professor do Departamento de Engenharia Elétrica e de Computação. “Será muito mais rápido passar de paciente para paciente.” A interface foi publicada na revista Pnas Nexus.
Plasticidade
O trabalho de Millán em interfaces cérebro-computador ajuda os usuários a orientar e fortalecer sua plasticidade neural — a capacidade do cérebro de mudar, crescer e se reorganizar ao longo do tempo. Esses experimentos são projetados para melhorar a função cerebral dos pacientes e usar dispositivos controlados pela interação da mente com a máquina, para facilitar suas vidas.
Nesse caso, as ações foram duplas: o jogo de corrida de carros e uma tarefa mais simples, de equilibrar os lados esquerdo e direito de uma barra digital. Um especialista foi treinado para desenvolver um decodificador para a segunda atividade, que possibilita que a interface traduza ondas cerebrais em comandos. O equipamento serve de base para os demais usuários e é a chave para evitar o longo processo de calibração.
Melhorias
O projeto atual utilizou 18 voluntários sem deficiência motora. Mas, quando a tecnologia avançar, os cientistas esperam testá-la em pessoas com deficits motores “Por um lado, queremos traduzir a interface para o âmbito clínico para ajudar pessoas com deficiência; por outro, precisamos melhorar nossa tecnologia para torná-la mais fácil de usar e para que o impacto positivo para essas pessoas seja mais forte”, disse Millán.
O pesquisador e a equipe continuam trabalhando em uma cadeira de rodas que os usuários possam dirigir com a interface cérebro-computador. Em uma conferência realizada neste mês, os pesquisadores mostraram outro uso potencial da tecnologia, controlando dois robôs de reabilitação para mãos e braços.
Embora o experimento não seja descrito no artigo, é, segundo Millán, um sinal de onde a tecnologia poderá chegar no futuro. Várias pessoas se ofereceram como voluntárias e conseguiram operar os robôs controlados pelo cérebro em poucos minutos. “O objetivo dessa tecnologia é ajudar as pessoas, ajudá-las em suas vidas cotidianas”, disse Millán. “Continuaremos nesse caminho onde quer que nos leve.”
Suavidade robótica no toque
A percepção de suavidade desempenha um papel crucial em muitas ações e interações — desde avaliar se uma fruta está madura até realizar um exame médico ou segurar a mão de um familiar. Mas compreendê-la e reproduzi-la é um desafio, porque envolve muitos processos sensoriais e cognitivos.
A robótica já tentou simular essa percepção. Mas tentativas anteriores de superar o desafio não distinguiram entre dois elementos primários da percepção de suavidade: sinais cutâneos (feedback sensorial da pele da ponta do dedo) e cinestésicos (feedback sobre a quantidade de força aplicada).
“Se você pressionar um marshmallow com a ponta do dedo, é fácil perceber que ele está macio. Mas se você colocar um biscoito duro em cima do marshmallow e pressionar novamente, ainda poderá dizer que o marshmallow macio está por baixo, mesmo que a ponta do seu dedo esteja tocando uma superfície dura”, explica Mustafa Mete, estudante de doutorado no Laboratório de Robótica Reconfigurável da Ecole Polytechnique Fédérale de Lausanne, na Suíça. “Queríamos ver se poderíamos criar uma plataforma robótica que pudesse fazer o mesmo.”
Utilizações
O SORI reproduz fielmente a sensação por meio de suavidade tátil: revolucionário(foto: Jamani Caillet/Divulgação )
A medicina é uma área primária de aplicação potencial para essa tecnologia, por exemplo, para treinar estudantes na detecção de tumores cancerígenos ou para fornecer retorno a cirurgiões que utilizam robôs para realizar operações. Outras aplicações incluem a exploração do espaço ou das profundezas do oceano assistida, nas quais o dispositivo permitiria aos cientistas sentir a suavidade de um objeto descoberto, mesmo em um lugar remoto.
O Sori é também uma resposta potencial para um dos maiores desafios da agricultura assistida por robôs: colher frutas e vegetais tenros sem esmagá-los. “O objetivo não é funcionar como um sensor de suavidade para robôs, mas sim transferir a sensação de ‘toque’ digitalmente, assim como enviar fotos ou música”, resume Mete.













Você precisa estar logado para postar um comentário Login